Understanding IK
Kinematics is the study of motion velocity, rotation, and position. In terms of structures such as arms and legs, kinematics is used to calculate how actions taken at a structure’s root determine the position and rotation of the other end. For example, hold your arm straight and rotate your shoulder joint. Kinematics calculates the change in position of your arm, hand, and fingers. If you know the angle by which you rotated your shoulder, you can calculate your arm’s new position.
It follows that Inverse Kinematics studies the same problem from the other end: The extremity moves, and IK determines how the objects joined to it must respond in order to support the new placement. If you raise your hand straight out to the side, your hand, arm, and shoulder must move to accommodate your hand’s new position. Or if someone was to grab your hand and push, your arm would bend while your body remains still.
Poser supports IK for the arms and legs. With IK enabled, you can translate the hands and feet and achieve appropriate arm and leg positions automatically. IK creates targets to indicate the end of the chain. When the hands or feet move, the target is set to its new position. Moving any other body part keeps the target in its original position relative to the rest of the body. Once the target is reached, the end of the chain is fixed and the other parts must bend to accommodate the hand or foot position. For example, a foot reaches its target and the knee bends.
To work effectively with IK, you need to keep the following things in mind:
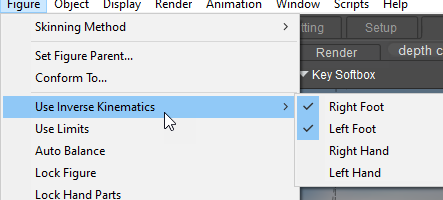
- Enable (turn on) IK when you are working with the Editing tools. You can toggle Inverse kinematics (IK) on and off for the following limbs:
- Right Foot
- Left Foot
- Right Hand
- Left Hand
Enabling IK on a pose created with IK disabled may alter your pose.
- To toggle IK on or off for a limb, select Figure > Use Inverse Kinematics > limb, where limb is one of the four limbs. A checkbox next to a limb indicates that IK is active for that limb, and vice versa.
You can enable or disable IK for the legs and hands.
- The Rotate, Translate, and Twist tools may not behave as you might expect for some body parts. For example, you cannot easily rotate or translate a thigh or shin when IK is enabled for that leg because the foot’s position takes precedence. This behavior corresponds to real life: When you stand, your feet and legs support your body, meaning that you cannot arbitrarily move or rotate them. This consideration applies to both the Editing tools and the parameter dials.
- You cannot use IK and the Chain Break tool (see Chain Break) on the same limb.